|
Dr. Zhichao Liu I'm a tenure track assitant professor of Computer Engineering at Univesity of Houston-Clear Lake. Previously, I worked as Postdoctoral Research Scientist at University of Arkansas in Fayettiville, AR. I worked with Prof. Mehran Armand and Prof. Alejandro Martin-Gomez on emboided medical robots and imaging systems. From 2023 to 2024, I worked as a Postdoc in University of California Riverside in Riverside CA with Prof. Konstantinos Karydis , I lead research efforts in robotic learning, perception, and embodied AI navigation, with a focus on applications in precision farming and field autonomy. I obtained my PhD in Electrical and Computer Engineering at University of California Riverside in 2023. Research Group / Email / Scholar / LinkedIn |

|
ResearchPlease Check My New Website! I am interested in high-level robotic autonomy across various locomotion modalities, leveraging AI-driven perception and path planning in natuaral challenging environments, while enabling human-level dexterous manipulation in complex physical interactions. |
|
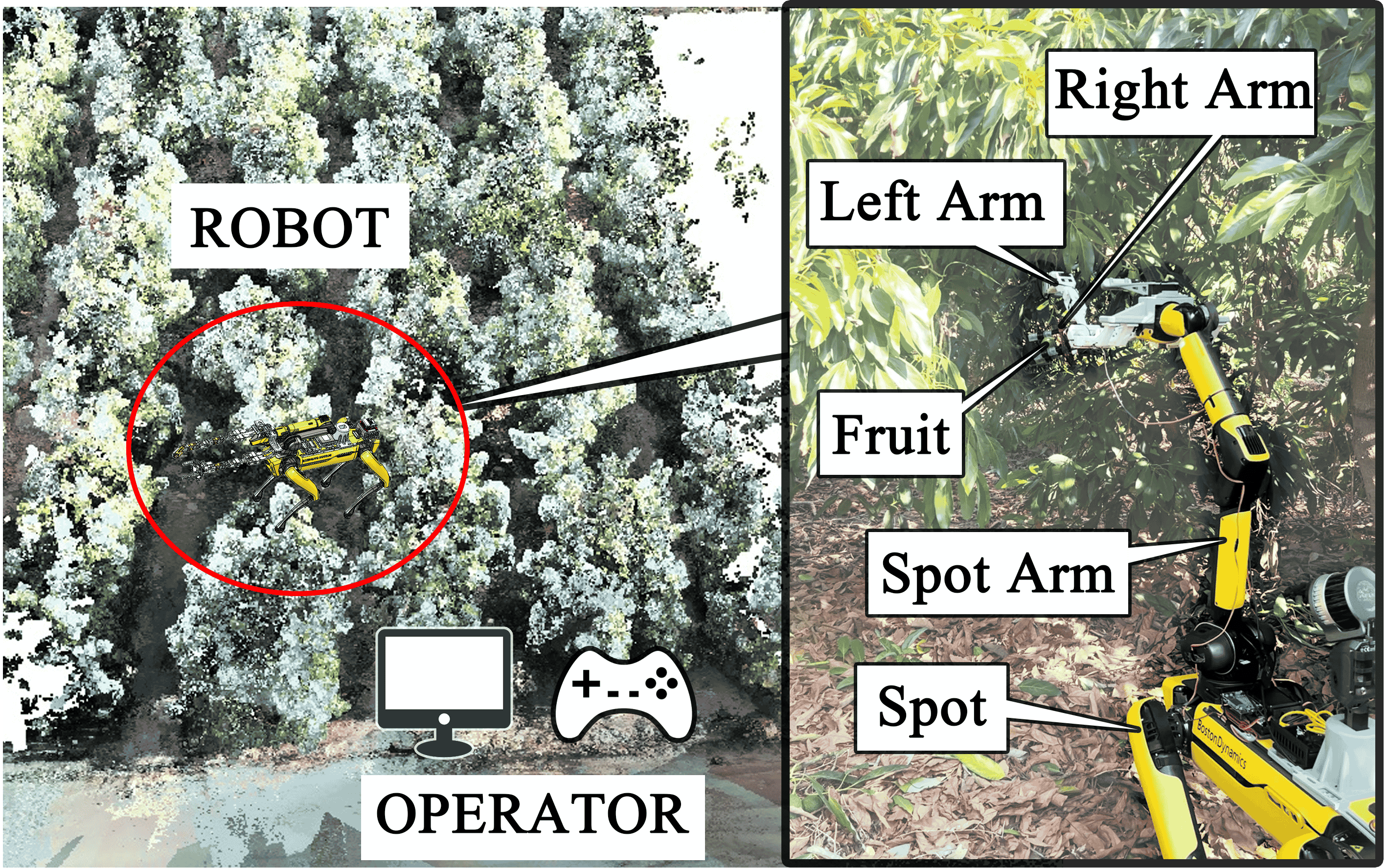
Hierarchical Tri-manual Planning for Vision-assisted Fruit Harvesting with Quadrupedal Robots
Zhichao Liu*, Jingzong Zhou*, Konstantinos Karydis IEEE International Conference on Robotics and Automation (ICRA), 2025 (Accepted) project page / arXiv / video This paper addresses the challenge of developing a multi-arm quadrupedal robot capable of efficiently harvesting fruit in complex, natural environments. We introduce the first three-arm quadrupedal robot LocoHarv-3 and propose a novel hierarchical tri-manual planning approach, enabling automated fruit harvesting with collision-free trajectories. Our comprehensive semi-autonomous framework integrates teleoperation, supported by LiDAR-based odometry and mapping, with learning-based visual perception for accurate fruit detection and pose estimation. |
|
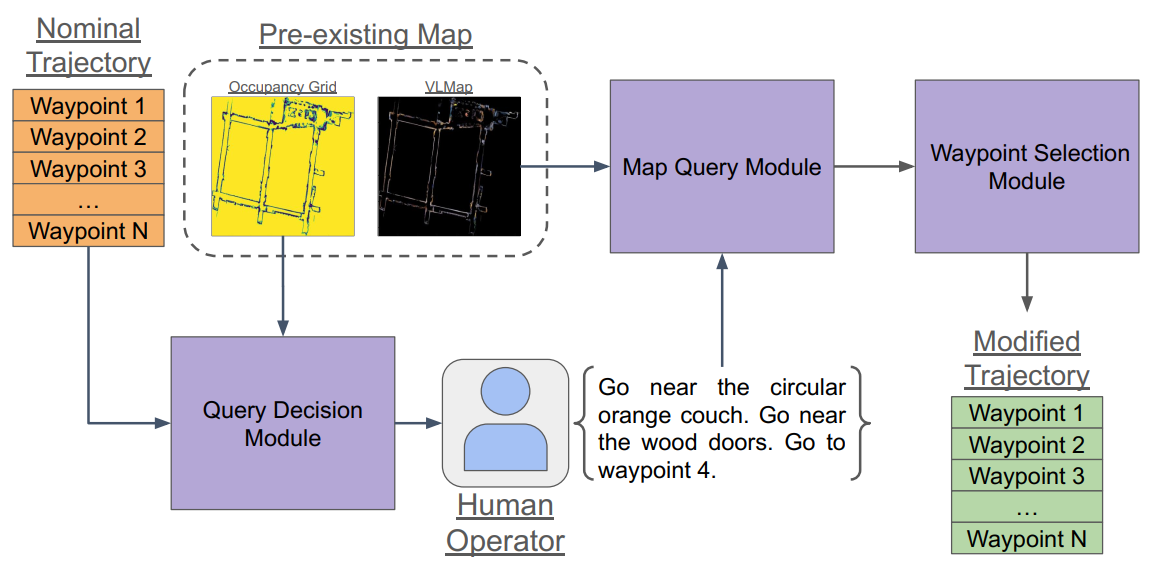
Language-guided Robust Navigation for Mobile Robots in Dynamically-changing Environments
Cody Simons, Zhichao Liu, Brandon Marcus, Amit K Roy-Chowdhury, Konstantinos Karydis IEEE International Conference on Automation Science and Engineering (CASE), 2025 (Under Review) project page / arXiv / video This paper presents an embodied AI system designed for human-in-the-loop navigation using a wheeled mobile robot. The authors propose an effective method to monitor the robot’s current plan, detect significant environmental changes affecting its trajectory, and query a human for feedback. The system translates human feedback provided in natural language into local navigation waypoints, integrating these into a global planning framework that uses a semantic feature map and obstacle map. |
|
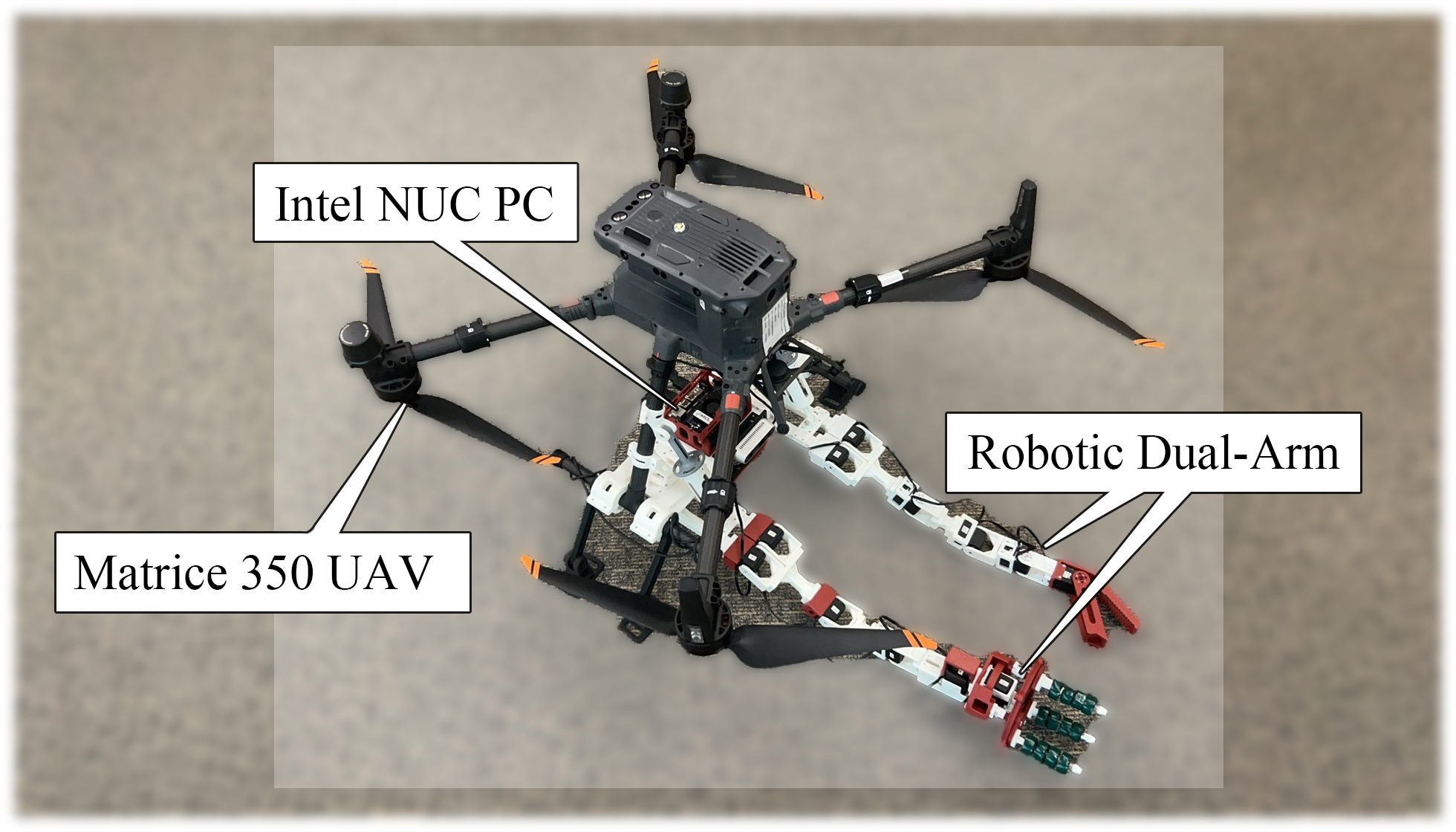
Vision-assisted Avocado Harvesting with Aerial Bimanual Manipulation
Zhichao Liu*, Jingzong Zhou*, Caio Mucchiani, Konstantinos Karydis Advanced Robotics Research, 2024 (Accepted) project page / arXiv / video This paper explores the design and implementation of a bimanual UAV for autonomous avocado harvesting, aimed at improving efficiency in precision agriculture. Ground-based robots are often ineffective for crops like avocados due to unstructured terrain and hard-to-reach fruits. To address this, the UAV is equipped with two arms: a gripper and a fixer arm. The gripper detaches avocados by applying rotational motion, while the fixer arm stabilizes the peduncle, which can store elastic energy, preventing detachment. The UAV employs visual perception and learning to detect avocados and estimate their pose, which informs the bimanual manipulation planner. |

|
Contact-prioritized planning of impact-resilient aerial robots with an integrated compliant arm
Zhichao Liu, Zhouyu Lu, Ali-akbar Agha-mohammadi, Konstantinos Karydis IEEE/ASME Transactions on Mechatronics, 2023 DOI / arXiv / video The article presents an impact-resilient aerial robot (s-ARQ) equipped with a compliant arm designed to reduce collision impact and sense contacts. The robot includes a real-time contact force estimator and a non-linear motion controller that enables it to handle collisions during aggressive maneuvers and stabilize after high-speed impacts with walls. Additionally, a new collision-inclusive planning method, which prioritizes contacts to assist navigation in cluttered environments, is introduced. |
|
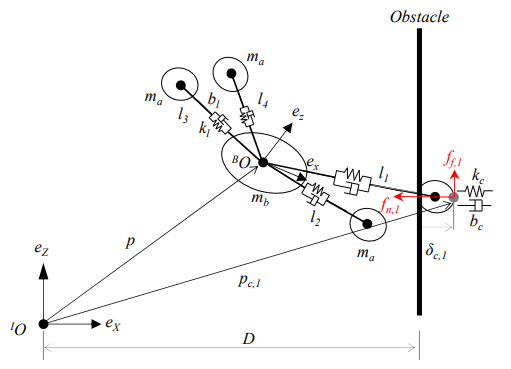
Dynamic Modeling and Analysis of Impact-resilient MAVs Undergoing High-speed and Large-angle Collisions with the Environment
Zhichao Liu, Konstantinos Karydis IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 DOI / arXiv / video This study explores the impact-resilient capabilities of MAVs with passive springs in their compliant arms, using dynamic modeling to show that compliance improves impact resilience. Extensive tests demonstrate the MAV's ability to stabilize after high-speed, large-angle wall collisions. The study also includes comparisons with rigid MAVs to assess the trade-offs of adding compliance to the robot's frame. |
|
|
Robust generalized proportional integral control for trajectory tracking of soft actuators in a pediatric wearable assistive device
Caio Mucchiani, Zhichao Liu, Ipsita Sahin, Elena Kokkoni, Konstantinos Karydis IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 DOI / arXiv This paper develops and validates a closed-loop controller for soft pneumatic actuators in a pediatric wearable robotic device, achieving accurate trajectory tracking for two-degree-of-freedom shoulder motion in an infant-sized mannequin. |
|
|
Koopman operators for modeling and control of soft robotics
Lu Shi, Zhichao Liu, Konstantinos Karydis Current Robotics Reports, 2023 DOI / arXiv The paper provides a review of recent advances in the application of Koopman operator theory for the modeling and control of soft robots. |
|
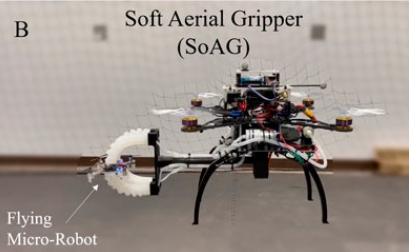
Safely catching aerial micro-robots in mid-air using an open-source aerial robot with soft gripper
Zhichao Liu, Caio Mucchiani, Keran Ye, Konstantinos Karydis Frontiers in Robotics and AI, 2022 DOI / video This work presents the development of a Soft Aerial Gripper (SoAG) equipped with a horizontal soft gripper and pneumatic system, designed to safely catch aerial micro-robots mid-air by mitigating aerodynamic disturbances, with experimental results demonstrating its effectiveness in both static and dynamic grasping scenarios. |
|
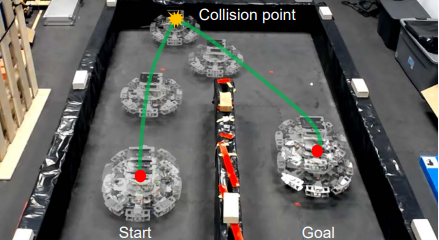
Online search-based collision-inclusive motion planning and control for impact-resilient mobile robots
Zhouyu Lu, Zhichao Liu, Merrick Campbell, Konstantinos Karydis IEEE Transactions on Robotics, 2022 DOI / arXiv / video This article introduces a hierarchical framework for collision-inclusive motion planning and control for impact-resilient mobile robots navigating in unknown and cluttered spaces. The framework integrates a local collision recovery and trajectory replanning strategy with a global search-based planning algorithm that exploits potential collisions to improve performance metrics like energy efficiency and computational time, showing efficacy through extensive simulation and experimental testing. |
|
Closed-loop position control of a pediatric soft robotic wearable device for upper extremity assistance
Caio Mucchiani, Zhichao Liu, Ipsita Sahin, Jared Dube, Linh Vu, Elena Kokkoni, Konstantinos Karydis IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 DOI / arXiv This work presents a closed-loop control system for a soft wearable device with pneumatic actuators, using proprioceptive feedback from IMUs to assist infant reaching tasks by regulating joint motion based on anthropometric data and desired trajectories, with successful experimental results demonstrated on a mannequin. | |
|
Deformation recovery control and post-impact trajectory replanning for collision-resilient mobile robots
Zhouyu Lu, Zhichao Liu, Konstantinos Karydis IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 DOI / arXiv This paper introduces a collision-inclusive motion planning approach for impact-resilient mobile robots, featuring a deformation recovery controller and post-impact trajectory replanner that optimize recovery after collisions and generate efficient trajectories, with experimental validation on an omnidirectional robot equipped with Hall effect sensors. | |
|
Position control and variable-height trajectory tracking of a soft pneumatic legged robot
Zhichao Liu, Konstantinos Karydis IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 DOI / arXiv This paper presents a closed-loop trajectory tracking control scheme for soft pneumatic legged robots, demonstrating precise control of body height and orientation over flat terrain using a compact pneumatic regulation system, with experiments showing successful tracking of straight, curved, and variable-height trajectories, laying the foundation for autonomous navigation. | |
|
Toward impact-resilient quadrotor design, collision characterization and recovery control to sustain flight after collisions
Zhichao Liu, Konstantinos Karydis IEEE International Conference on Robotics and Automation (ICRA), 2021 DOI / arXiv / video This paper introduces a collision-resilient quadrotor with a compliant arm design that absorbs shocks, alongside a novel collision detection method using Hall sensors and a recovery control strategy for smooth trajectory tracking post-collision, demonstrating the robot's ability to detect and recover from high-speed impacts with various obstacles, including unstructured surfaces and moving objects. | |
|
Motion planning for collision-resilient mobile robots in obstacle-cluttered unknown environments with risk reward trade-offs
Zhouyu Lu, Zhichao Liu, Gustavo J. Correa, Konstantinos Karydis IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020 DOI / arXiv This paper presents a novel sampling-based online planning algorithm for navigating unknown, obstacle-cluttered environments by allowing potential collisions to be harnessed rather than avoided, featuring a joint optimization function that evaluates collision effects and a state expansion pruning technique to reduce search space, with experimental validation on a collision-tolerant holonomic wheeled robot exploring trade-offs between risk levels, collision decision-making, and trajectory efficiency. | |
|
Sorx: A soft pneumatic hexapedal robot to traverse rough, steep, and unstable terrain
Zhichao Liu, Zhouyu Lu, Konstantinos Karydis IEEE International Conference on Robotics and Automation (ICRA), 2020 DOI This paper introduces SoRX, a novel soft robotic hexapedal robot utilizing a new 2-degree-of-freedom soft pneumatic actuator, achieving forward speeds of up to 0.44 body lengths per second while successfully navigating various challenging terrains using an alternating tripod gait. | |
|
Development of a soft robotic wearable device to assist infant reaching
Elena Kokkoni, Zhichao Liu, Konstantinos Karydis Journal of Engineering and Science in Medical Diagnostics and Therapy, 2020 DOI This project develops and evaluates the first actuated wearable device for infants with or at risk for motor impairments, featuring four pneumatic actuators to actively assist upper extremity movement, with positive results on performance, wearability, and safety during vertical reaching tasks. |